4.7 Track interpolation
KaltoaKalmanPositions objects can be easily interpolated with the predict function.
The predicted state estimates and covariances will be returned in a new KaltoaPointPositions object.
# Get emission times to predict
times_out <- seq(
from = track_pmc@times[1],
to = track_pmc@times[length(track_pmc@times)],
by = 10) |> floor()
# Predict new positions
points_pmc_pred <- predict(track_pmc, times_out = times_out)
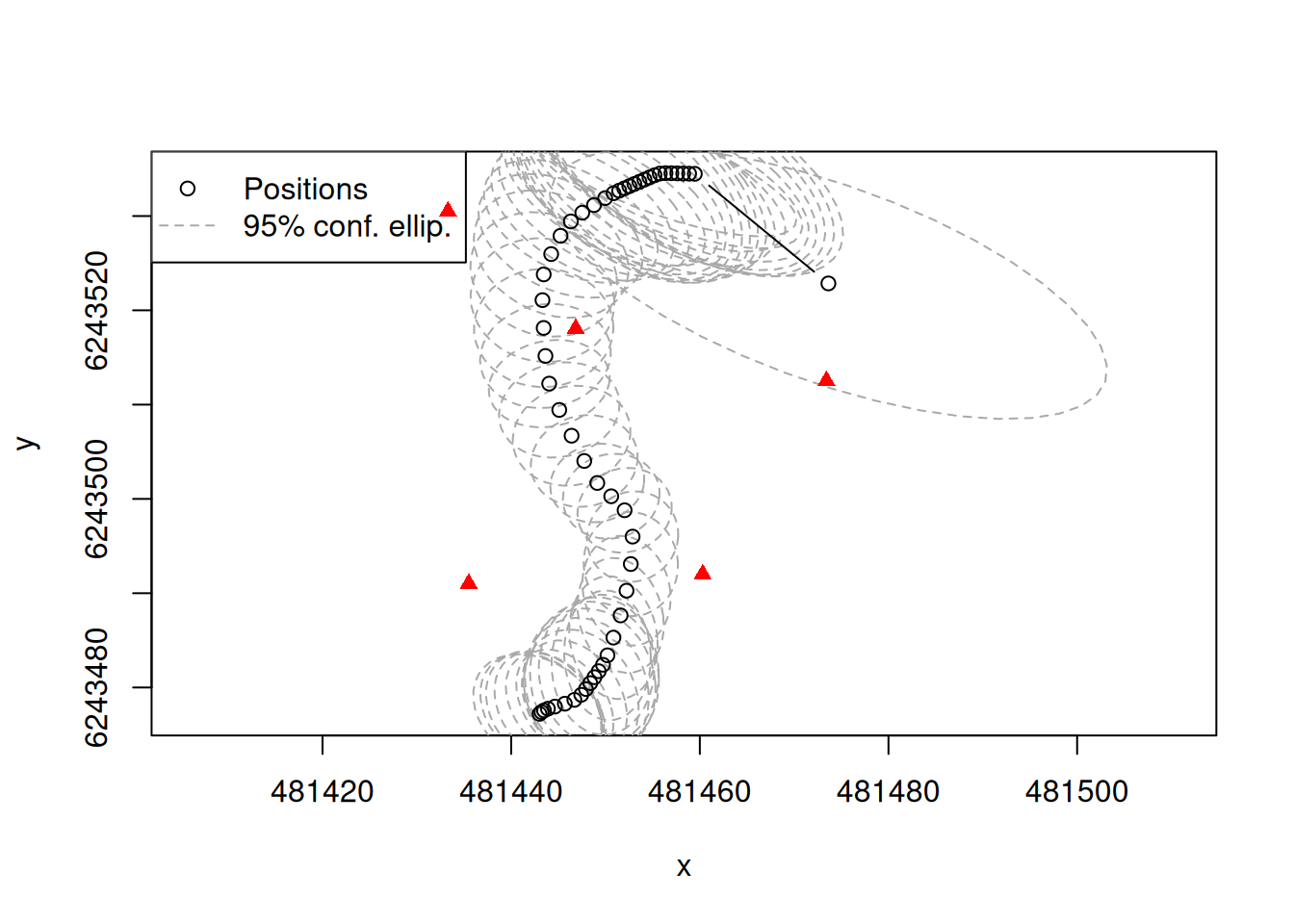
# Plot results
plot(points_pmc_pred)
points(positions(toa_ppm), pch = 17, col = 'red')